1. Alat dan Bahan[Back]
- Jumper

- Arduino Uno

Microcontroller ATmega328P |
Operating Voltage 5 V |
Input Voltage (recommended) 7 – 12 V |
Input Voltage (limit) 6 – 20 V |
Digital I/O Pins 14 (of which 6 provide PWM output) |
PWM Digital I/O Pins 6 |
Analog Input Pins 6 |
DC Current per I/O Pin 20 mA |
DC Current for 3.3V Pin 50 mA |
Flash Memory 32 KB of which 0.5 KB used by bootloader |
SRAM 2 KB |
EEPROM 1 KB |
Clock Speed 16 MHz |
- LED

LED merupakan kependekan dari Light Emitting Diode, yakni salah satu dari banyak jenis perangkat semikonduktor yang mengeluarkan cahaya ketika arus listrik melewatinya.
- Resistor

- Breadboard

breadboard adalah board yang digunakan untuk membuat rangkaian elektronik tanpa harus merepotkan pengguna untuk menyolder. Biasanya papan breadboard ini digunakan untuk membuat rangkaian elektronik sementara untuk tujuan uji coba atau prototype.
- Motor DC

- IC L239D

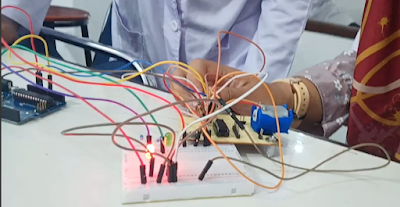
2. Rangkaian Simulasi[Back]
LIST CODE:
byte pot= A0; //Deklarasi pin A0 untuk potensiometer
byte motor= 8; //Deklarasi pin 9 untuk motor
int nilai; //Deklarasi variabel nilai
int output; //Deklarasi variabel output
int led1 = 9;
int led2 = 10;
void setup(){ //Semua kode dalam fungsi ini dieksekusi sekali
pinMode(motor, OUTPUT); //Deklarasi motor sebagai OUTPUT
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
Serial.begin(9600); //Set baud rate 9600
}
void loop(){ //Semua kode dalam fungsi ini dieksekusi berulang
nilai= analogRead(pot); //Membaca nilai potensiometer
output= map(nilai, 0, 1023, 0, 255);
analogWrite(motor, output);
if (nilai < 511){
digitalWrite(led1,HIGH);
digitalWrite(led2,LOW);
}
if ( nilai > 512){
digitalWrite(led2,HIGH);
digitalWrite(led1,LOW);
}
else {
digitalWrite(led2,LOW);
}
delay(2);}
PENJELASAN:
Praktikum menggunakan motor DC, potensiometer, dan LED dengan kondisi jika potensio diputar 1/2 atau diperkecil hambatannya 1/2 putaran, maka motor DC akan berputar dan LED merah akan hidup dan jika potensio diputar lebih dari 1/2 putaran maka LED hijau akan hidup.
Potensiometer dihubungkan ke pin A0 dan motor dihubungkan ke pin 8 , LED Merah dihubungkan ke pin 9, dan LED hijau dihubungkan ke pin 10 Arduino.
Lalu pin motor, LED merah, dan LED hijau dijadikan Output pada fungsi setup.
Lalu ada fungsi loop yang berisikan pembacaan nilai analog dari potensio dimana menggunakan nilai map yang berfungsi untuk memetakan ulang suatu nilai (angka) dari rentang satu ke dalam rentang lainnya. Code: output= map(nilai, 0, 1023, 0, 255); berarti nilai 0 = tingkatan ke 0 dan nilai 1023 = tingkatan ke 255. Juga, code itu untuk mengkonversikan nilai ADC ke PWM dari nilai analog potensiometer yang sudah terbaca.
Lalu ada penulisan analog dari motor sebagai output. Ada percabangan if jika nilai < 511, maka LED merah hidup dan LED hijau mati. Jika nilai > 512, maka LED hijau hidup dan LED merah mati. Jika tidak keduanya, maka kedua LED mati.
3. Prinsip Kerja Rangkaian[Back]
3. Video Rangkaian[Back]
5. Analisa[Back]
Percobaan 1:
- Analisa percobaan 1 termasuk percobaan PWM atau ADC?
- Analisa perbandingan pecobaan proteus dengan percobaan praktikum?
- Analisa pengaruh VSS dengan VS terhadap kondisi motor DC pada praktikum?
Jawab:
- Percobaan 1 termasuk percobaan PWM. PWM Adalah salah satu teknik modulasi yg mengubah Lebar pulsa (pulse width) dengan nilai frekuensi dan amplitudo (tinggi pulsa) yang tetap. PWM Memanipulasi keluaran digital sedemikian rupa sehingga menghasilkan sinyal analog. Pin yang dipakai yaitu analog output pada arduino yang berarti mengirimkan sinyal analog dengan intensitas yang ditentukan sesuai kebutuhan. Pada percobaan ini, potensial meter dihubungkan ke pin A0 arduino dan nilainya dibaca dengan analogRead() dan untuk mengatur outputnya (motor) dengan nilai input dari nilai analog potensiometer. Lalu diatur kecepatan motor dengan kondisi yang ditentukan menggunakan nilai potensiometer dan percabangan if.
- Percobaan proteus tidak menggunakan potensiometer ke motor sedangkan saat praktikum menggunakannya. Dikarenakan, pada proteus kondisinya membuat motor bergerak searah, Sedangkan pada saat praktikum, kondisinya mengatur motor DC bergerak memakai potensio meter dimana jika potensi diperbesar maka Motor dc awalnya diam, lalu perlahan berputar dan LED merah hidup (Pot < 511. Jika nilai pot >= 512 maka LED hijau aktif dan motor berputar semakin kencang.
- Vs digunakan untuk mengaktifkan IC L239D yang diberikan tegangan 5-volt atau jalur input sumber tegangan IC L239D. Vs ialah jalur input sumber tegangan untuk motor dc yang dikendalikan. Pada saat praktikum, pin vs diberikan tegangan 5 volt yang berarti motor bergerak hanya saja kecepatannya bergerak kurang cepat dibanding jika diberikan tegangan 12 volt.
6. Link Download[Back]
Datasheet Motor DC Download File
Datasheet Driver Motor L293D Download File
Datasheet Potensiometer Download File
