Desain Sistem Kontrol Ketinggian Air Bendungan Menggunakan Metode Optimasi Genetic Algorithm
Referensi: Setiawan, A., Zuhrie, M. S., Anifah, L., & Buditjahjanto, I. G. P. A. (2021). Desain Sistem Kontrol Ketinggian Air Bendungan Menggunakan Metode Optimasi Genetic Algorithm. JURNAL TEKNIK ELEKTRO, 10(2), 517-525.
PENDAHULUAN
Bendungan adalah suatu wadah untuk menampung
maupun menahan air, dimana air tersebut dapat
dimanfaatkan untuk berbagai tujuan. Dengan banyaknya manfaat bendungan, maka
diperlukan sebuah sistem kontrol yang bisa mengontrol
level air bendungan supaya ketinggian air tersebut selalu
berada pada keadaan yang stabil. Sistem ini diperlukan
untuk mengatasi masalah terhadap curah hujan yang tidak
dapat diprediksi pada masing-masing wilayah. Di
Indonesia sendiri masih banyak bendungan yang
menggunakan sistem manual dalam pengoperasiannya,
sehingga masih terdapat kendala-kendala yang kita tidak
inginkan.
Pada penelitian ini penulis mengembangkan suatu
sistem kendali dengan metode optimasi Algoritma
Genetika, yang mana tujuannya menghasilkan
serta melihat hasil dari percobaan suatu sistem
kontrol level air bendungan saat memakai metode optimasi
Genetic Algorithm. Sehingga kita diharapkan dapat
memperkecil overshoot dan error yang ada pada respon
sistem tersebut.
Pada penelitian ini penulis menggunakan
software Matlab yang dimanfaatkan untuk mencari nilai dari
Kp, Ki, dan Kd dengan cara metode optimasi Algoritma
Genetika yang mana nantinya akan dimasukkan dalam
kontroler PID.Juga, digunakan untuk menjalankan simulasi dan menampilkan respon dari sistem
kontrol ketinggian air bendungan.
Desain Diagram Blok
Berdasarkan Gambar diatas. Perancangan software dimulai
dengan memasukan nilai set point serta penginput nilai Kp,
Ki, dan Kd pada PID controller yang mana telah didapat
melalui metode Genetic Algorithm, proses akan dilanjutkan
pengontrolan PID yang mana akan memberikan aksi motor
DC sebagai penggerak pintu bendungan serta akan
ditampilkan grafik respon ketinggiannya, proses akan
berhenti jika ketinggian mencapai atau sama dengan set
point dan akan berlanjut apabila ketinggian belum
mencapai set point.
Pemodelan Dinamik BendunganDesain pada sistem bendungan ini menggunakan sistem pintu yang mana akan digerakan oleh sebuah actuator yaitu motor DC.
Input disini berupa ketinggian air yang mana akan dikontrol oleh kontroler PID dengan metode optimasi Algoritma Genetika sehingga akan membuat motor DC menggerakan gerbang pada saat mencapai set point yang telah diatur. Sensor ultrasonik akan mengirim sinyal umpan balik berupa ketinggian air secara berkelanjutan sehingga dapat mencapai ketinggian air yang sesuai dengan set point yang telah ditentukan.
Skema Flowchart
Perancangan software dimulai dengan memasukan nilai set point serta penginput nilai Kp, Ki, dan Kd pada PID controller yang mana telah didapat melalui metode Genetic Algorithm, proses akan dilanjutkan pengontrolan PID yang mana akan memberikan aksi motor DC sebagai penggerak pintu bendungan serta akan ditampilkan grafik respon ketinggiannya, proses akan berhenti jika ketinggian mencapai atau sama dengan set point dan akan berlanjut apabila ketinggian belum mencapai set point.
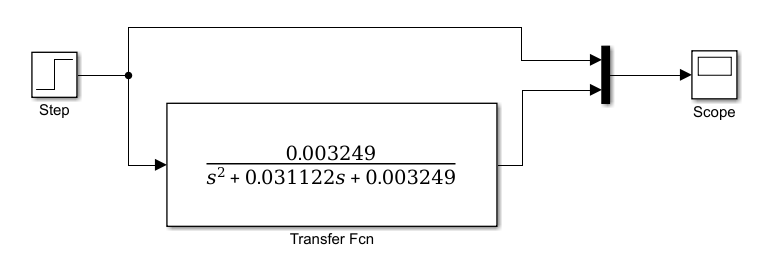
Penelitian ini menggunakan pendekatan karakteristik sistem orde 2 agar dapat memperoleh sebuah fungsi transfer. Pada penelitian ini menggunakan set point 10 cm dengan nilai fungsi transfer dari nilai acuan jurnal sebelumnya sebagai berikut:
Setelah didapatkan transfer fungsi, maka kita akan melihat bagaimana respon yang didapat dari sistem open loop tanpa kontroler PID dengan cara mensimulasikan transfer fungsi tersebut ke diagram blok open loop sistem
Berdasarkan Gambar 8. Menunjukan bahwa respon keluaran yang dihasilkan sistem open loop tanpa kontroler PID masih kurang stabil dimana masih terdapatnya overshoot serta untuk mencapai set point (ketinggian air) masih membutuhkan waktu yang cukup lama. Sehingga sistem tersebut memerlukan sebuah kontroler agar mendapatkan hasil respon keluaran yang stabil.
Perancangan Kontroller PID
Metode optimasi Genetic Algorithm digunakan sebagai pencarian sebuah nilai Kp, Ki, dan Kd pada kendali PID yang berfungsi sebagai kontroler untuk mengontrol ketinggian air pada bendungan. Setelah mengetahui bagaimana respon dari open loop kemudian kita akan menentukan nilai Kp, Ki, Kd dengan membuat script fitness function.
Setelah selesai membuat scipt function seperti Gambar 9, maka kita akan mengaplikasikan script fuction tersebut kedalam fitur optimization. Pada fitur optimization kita akan memilih Genetic Algorithm pada menu solver
Variabel yang kita masukan berjumlah 3 variabel yaitu Kp, Ki, dan Kd. Setelah itu kita harus menentukan batas bawah dan batas atas pada menu bounds untuk mendapatkan hasil yang optimal. Ketika semua menu yang dibutuhkan telah terisi semua, maka kita dapat menjalankannya dengan menekan tombol start dan akan bekerja dengan cara looping secara otomatis. Untuk menghentikan kerja sistem tersebut dapat dilakukan oleh user dengan menekan tombol stop.
Perancangan Simulasi pada MatlabPada percobaan kali ini akan melakukan suatu pengujian respon Kp, Ki, dan Kd yang telah didapat ke diagram blok rangkaian close loop dengan set point yang telah ditentukan. Diagram blok pada simulink
KesimpulanSetelah mendapatkan hasil penelitian, didapatkan sebuah
kesimpulan bahwa metode optimasi Algoritma Genetika
dapat mengontrol ketinggian air bendungan dengan cukup
baik karena dapat memberikan suatu respon yang sama
dengan set point yang telah ditetapkan. Dengan optimasi
Genetic Algorithm didapatkan nilai Kp = 4.75, Ki = 0.069,
Kd = 59,666 yang mana pada respon yang dihasilkan tidak
terdapat overshoot.
Pada metode fuzzy memiliki rise time lebih cepat
dibandingkan saat menggunakan metode optimasi Genetic
Algorithm, namun dengan metode Genetic Algorithm
mampu memeperbaiki nilai settling time serta memperkecil
overshoot dan error pada sistem tersebut. Hal ini dapat
dibuktikan dari hasil data simulasi yang telah didapat yang
mana didapat nilai settling time (ts) = 42.047 s, error steady
state = 0%, overshoot = 0% yang terjadi pada set point 12
cm.
VIDEO
GA
SIMULINK
YANG DICOBAKAN OLEH TEMAN LAIN
LINK DOWNLOAD